Welcome to our website on the half-day workshop ConRich
on October 2, 2025 as part of the Humanoids 2025 conference. This workshop will take place in Seoul, Korea.
Thank you for joining our workshop!
We were thrilled to welcome approximately 60 participants to the ConRich workshop at Humanoids 2025. The day was filled with insightful presentations and lively discussions that truly highlighted the exciting advancements and challenges in the field of contact-rich robotics. We hope the connections made and ideas shared will inspire future collaborations and innovations. We look forward to seeing the fruits of this workshop in the continued development of contact-aware robotic systems. Below are some memorable moments from our time together.








Best Poster Award
We are delighted to announce that the Best Poster Award of the ConRich Workshop 2025 goes to:
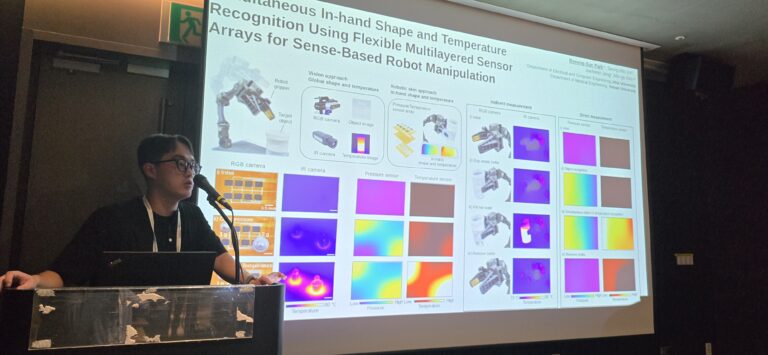
Simultaneous In-hand Shape and Temperature Recognition Using Flexible Multilayered Sensor Arrays for Sense-Based Robot Manipulation
by Byeong-Sun Park, Seong-Min Im, Jaehwan Jang, and Min-gu Kim
The organizing committee extends its warmest congratulations to the authors for their outstanding contribution and excellent presentation.
Time and Location
- Workshop: WT06
- Time: 8:55 – 12:30
- Room: 209B
This workshop aims to boost the community to address the challenges of contact-rich robotic applications. Experts in tactile-enhanced robots, whole-body motion planning and control, human motion analysis, and tactile sensors will share their knowledge and exchange ideas with junior researchers. We will set a platform to discuss the human aspects to study to understand how we exploit contacts in contact-rich tasks and the methods we must develop to apply this knowledge in robotics. What human motions should we record and study? How should we improve our models to handle contacts and whole-body hierarchical control? How can we use modern methods such as AI to achieve contact-rich interactions? what components are missing in the current tactile sensors and robot skins to provide feedback in contact-rich control? What are the possible applications for contact-rich tasks in robotics?
Workshop Description
In recent years, tactile sensors and robot skins have evolved from basic research prototypes for specific cases to promising robust and versatile sensing systems – equipping robots with new capabilities. Furthermore, new robot designs are beginning to consider them and even include them in their initial blueprints. Tactile-enhanced robotics brings a broad span of new applications and alternative solutions to the well-known problems related to manipulation and physical interaction. The ConRich workshop will explore new ideas in contact-rich robotics that allow robots to take advantage of large-scale tactile sensors and robot skins. The workshop will cover the design of new robot skin systems that enable contact-rich interactions, new control methods to exploit broad tactile information, learning and definition of contact-rich tasks and whole-body behaviors, and new multi-agent sensor systems to enable contact-rich collaborative robots. The goal of the workshop is to start a discussion and find the needs of the new generation of contact-aware robotic systems and the associated challenges. Bringing together the academic and industrial robotics communities to share points of view, experiences, and ideas to boost the development of contact-rich robotic solutions.
Workshop Schedule
- 08:55 – 09:00 Welcome and Introduction
- 9:00 – 9:10 Pitch spotlight presentations for poster sessions
- 09:10 – 10:30 Session 1: Invited talks
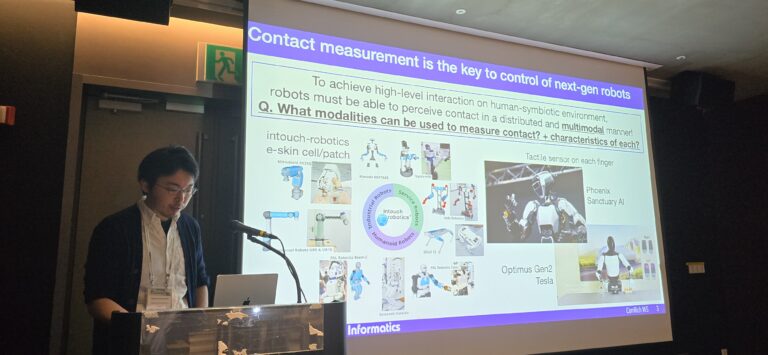
- 9:10 – 9:30 Prof. Taisuke Kobayashi (NII, Japan)
- 9:30 – 9:50 Dr. Masaki Murooka (AIST, Japan)
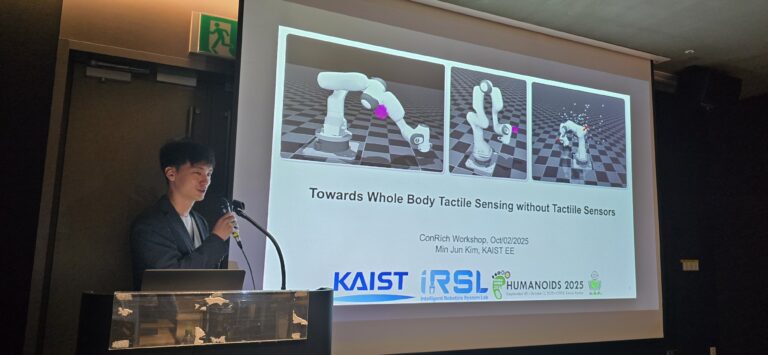
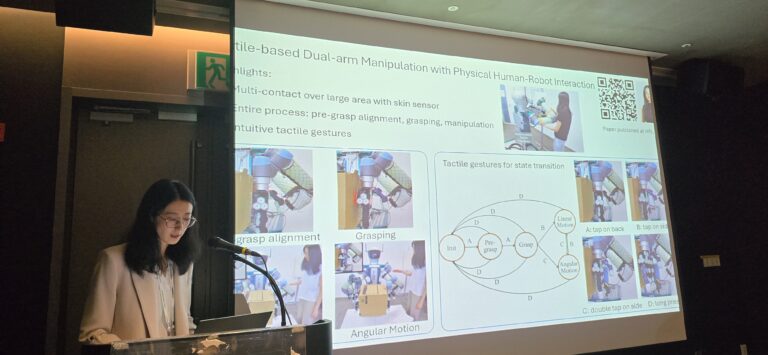
- 9:50 – 10:10 Prof. Min Jun Kim (KAIST, Korea)
- 10:10 – 10:50 Coffee break and interactive poster session
- 10:50 – 12:00 Session 2: Invited and industrial talks
- 10:50 – 11:10 Prof. Katja Mombaur (KIT, Germany)
- 11:10 – 11:30 Dr. Jose Barreiros (Toyota Research Institute, USA)
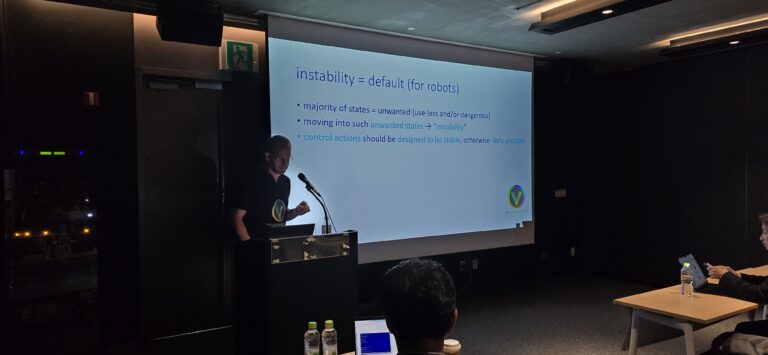
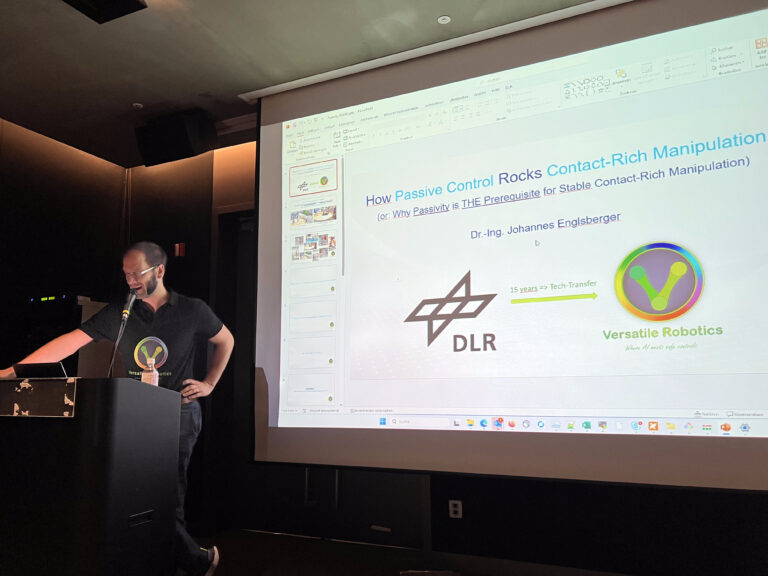
- 11:30 – 11:40 Industrial talk Dr. Johannes Englsberger (Versatile Robotics GmbH)
- 11:40 – 12:00 Award ceremony and panel discussion
Invited Speakers
| Speakers | Talks |
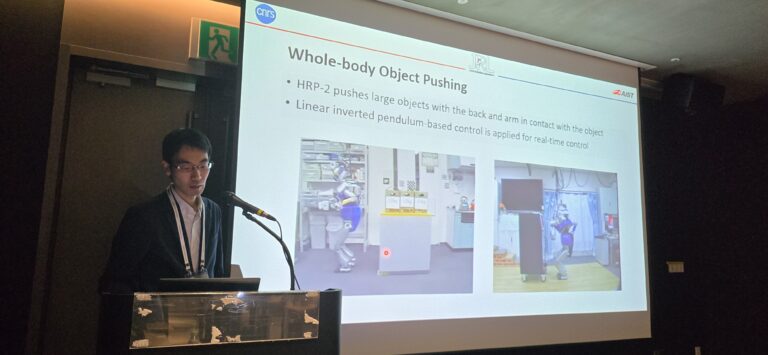
| Dr. Masaki Murooka (AIST, Japan) | Learning and Control of Whole-Body Contact Motions in Humanoids Based on Tactile Sensing |
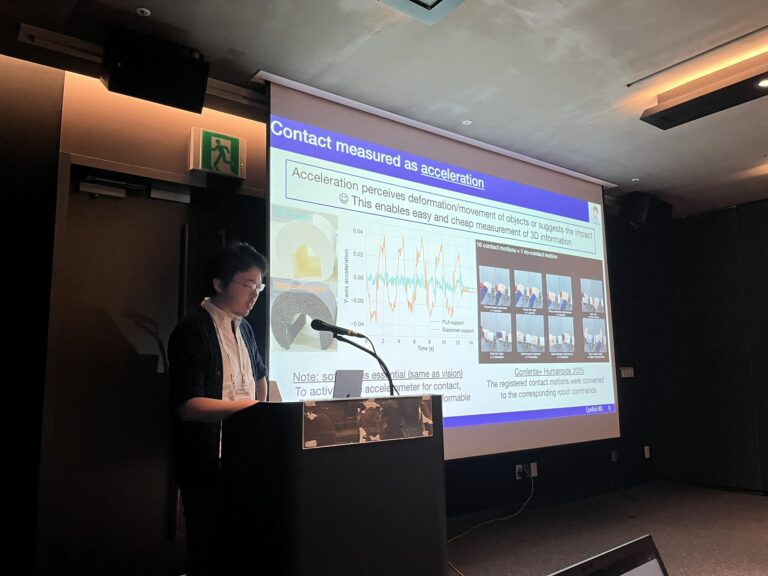
| Prof. Taisuke Kobayashi (NII, Japan) | Cross-modal Contact Measurement for Control of Motions |
| Prof. Katja Mombaur (KIT, Germany) | Comparing Perceived and Physical Contact of Humans with Humanoid Robots and Exoskeletons |
| Dr. Jose Barreiros (Toyota Research Institute, USA) | Teaching Robots to Move Big Things: From Human Demonstrations to Robot Skill |
| Prof. Min Jun Kim (KAIST, Korea) | Online Multi-contact Estimation and Control (via Mixture of Flow Matching and Particle Filter) |
| Dr. Johannes Englsberger (Versatile Robotics) | How Passive Controls Rocks Contact-rich Manipulation |
Organizers

Dr. J. Rogelio Guadarrama Olvera
Technical University of Munich
Technical University of Munich
University of Waterloo

CNRS-LAAS

Tokyo University of Science

Technival University of Munich
Endorsed by





Contacts
- J.Rogelio Guadarrama Olvera (rogelio.guadarrama@tum.de)
- Wenlan Shen (wenlan.shen@tum.de)